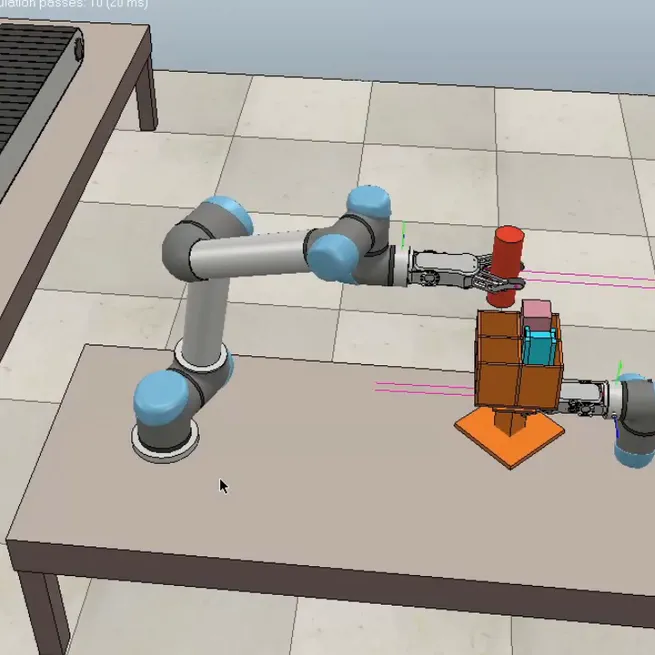
Dual UR5 Collaborative Assembly System
A dual-arm collaborative robotic assembly system using two UR5 robots with RG2 grippers, controlled through MoveIt! and CoppeliaSim for automated object assembly with conveyor belt integration and Docker containerization.
Mar 1, 2021
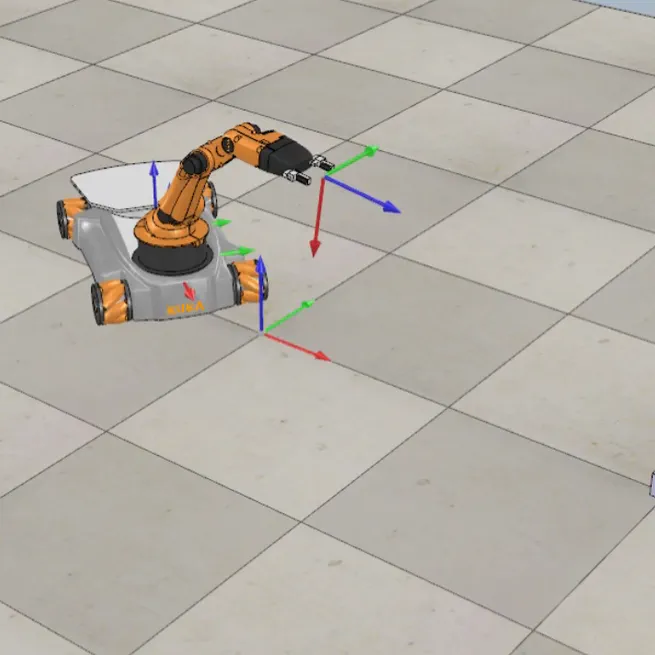
YouBot Mobile Manipulation: Pick-and-Place Control System
A comprehensive mobile manipulation system implementing trajectory planning, kinematic simulation, and feedback control for a KUKA youBot to autonomously pick up and place objects using Modern Robotics principles.
Nov 10, 2020