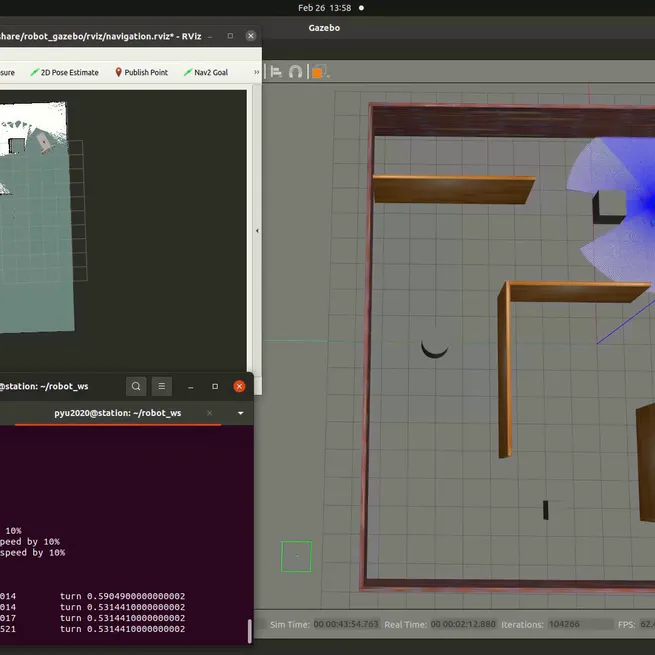
Quanticity Internship
The purpose of this internship is to complete the basic autonomy of a ground vehicle. I will complete the SLAM and navigation based on LIDAR LD06, IMU, a depth camera and RGB camera. I used ROS2 galactic, OpenCV and Navigation2 to finish the whole project. Before running navigation in the physical robots, I will test these approaches in the Gazebo Simulation platform.
Mar 5, 2022
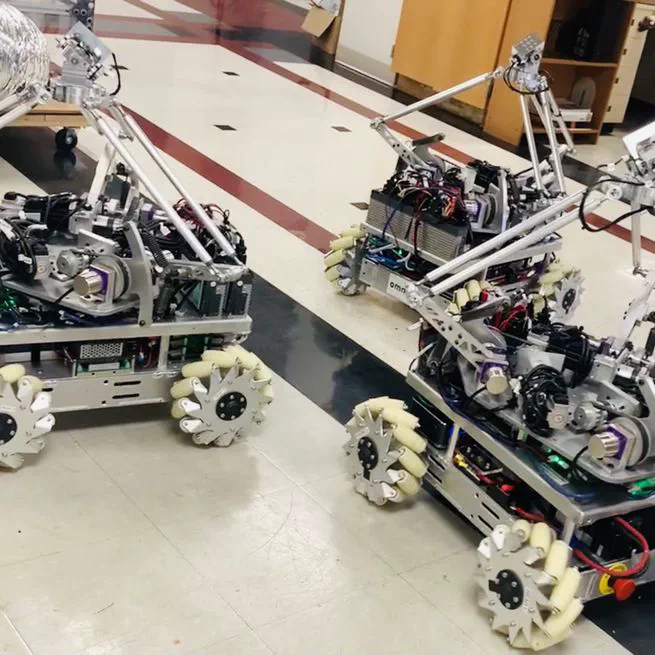
Collaborative Manipulation
The final goal of this project is to control a group of three omnidirectional robots to move some heavy objects together. There are two parts to this robot. The top half part of this robot is a delta robot, which is used to withstand some heavy objects. The bottom half part of this robot is an omnidirectional mobile robot with four mecanum wheels.
Dec 1, 2021
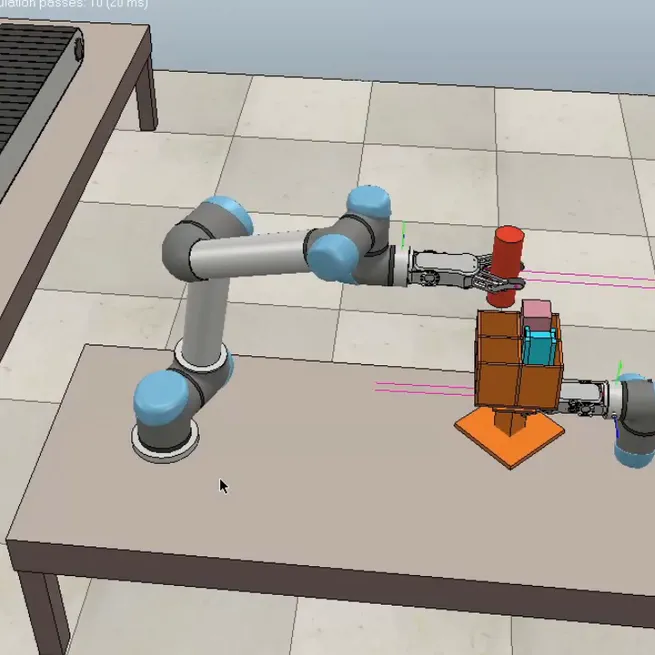
Dual UR5 Collaborative Assembly System
A dual-arm collaborative robotic assembly system using two UR5 robots with RG2 grippers, controlled through MoveIt! and CoppeliaSim for automated object assembly with conveyor belt integration and Docker containerization.
Mar 1, 2021
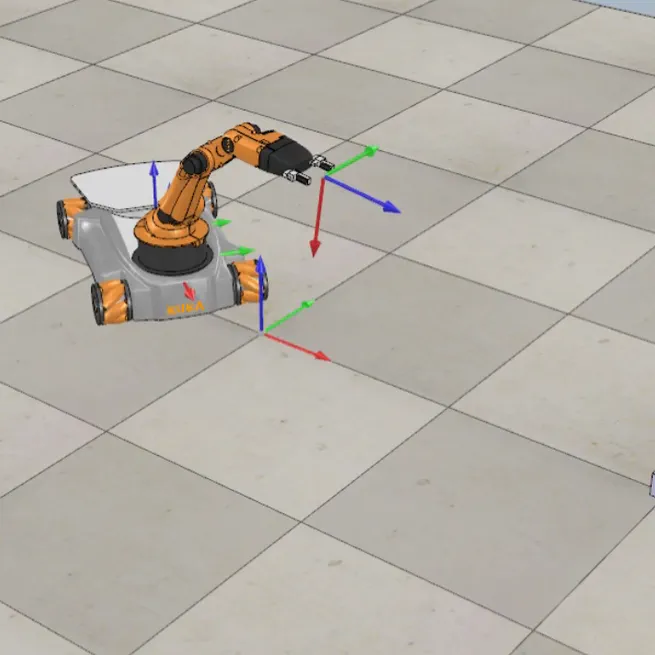
YouBot Mobile Manipulation: Pick-and-Place Control System
A comprehensive mobile manipulation system implementing trajectory planning, kinematic simulation, and feedback control for a KUKA youBot to autonomously pick up and place objects using Modern Robotics principles.
Nov 10, 2020