Collaborative Manipulation
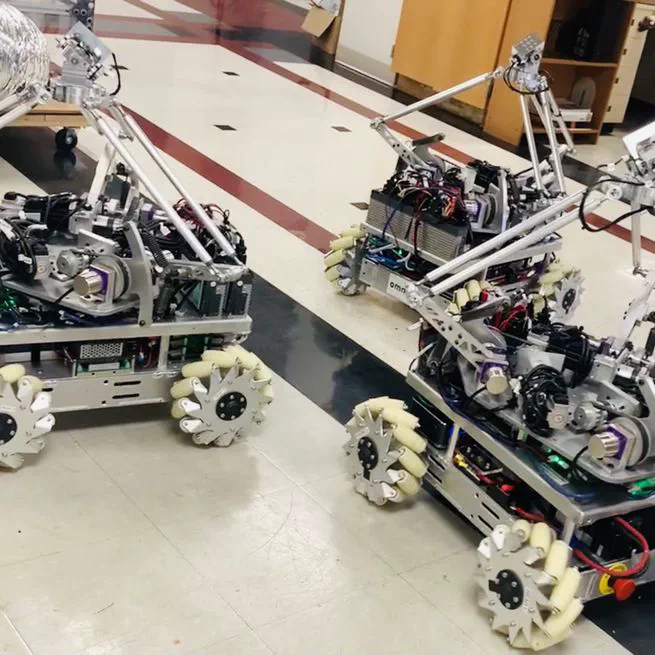
The final goal of this project is to control a group of three omnidirectional robots to move some heavy objects together. There are two parts to this robot. The top half part of this robot is a delta robot, which is used to withstand some heavy objects. The bottom half part of this robot is an omnidirectional mobile robot with four mecanum wheels.
Dec 1, 2021