Soft Haptics Display Toolkit
Demonstration
This work is published in 2025 IEEE 22nd International Conference on Ubiquitous Robots (UR).
Project Overview
This study presented a soft haptic display toolkit. It provides a rapid prototyping approach and real-time wireless control for a low-cost, 4×4 soft wearable fingertip-sized tactile display with a spatial resolution of 4 mm. The characterization results show the display’s performance with a maximum vertical displacement of 1.8 mm, a rise time of 0.25 second, and a maximum refresh rate of 8 Hz. This technology can be implemented to develop a high resolution remote haptic communication system.
Soft Haptic Display (SHD) Toolkit
A fingertip-sized, high-resolution pneumatic haptic display designed to provide realistic tactile feedback in virtual reality (VR) environments or during robot teleoperation. This repository includes all the hardware (CAD files, BOM) and software (Arduino, Raspberry Pi, GUI) needed to build and control the SHD.
Features
- 4×4 Wearable Tactile Array – A low-cost silicone actuator array with 16 individually controlled chambers.
- Desktop-Sized Control Box – Integrates an Arduino Due, a Raspberry Pi, and pneumatic valves.
- Real-Time Control – Low-latency wireless communication between the SHD and a PC or VR platform.
- Open-Source – All code, CAD files, and documentation are released under the MIT license.
- Easy to Build – Minimal development time; accessible to students and researchers with diverse backgrounds.
Screenshots
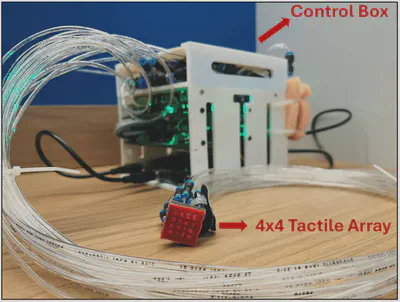
The 4 × 4 tactile array haptic display (red) is connected to the control box (white) via transparent air tubes. The control box communicates with the laptop wirelessly using a socket communication method.