Here are a selection of robotics projects that I have worked on over the years.
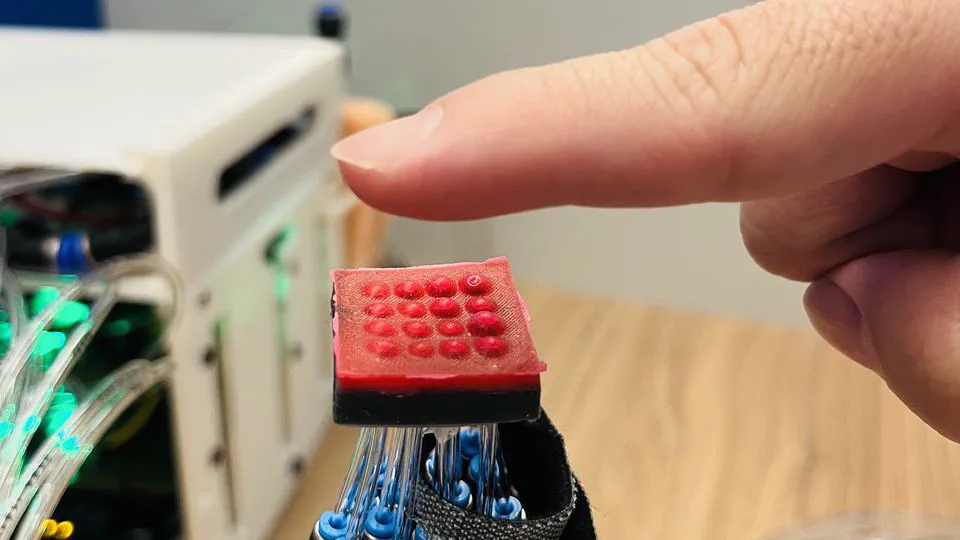
This study presented a soft haptic display toolkit. It provides a rapid prototyping approach and real-time wireless control for a low-cost, 4×4 soft wearable fingertip-sized tactile display with a spatial resolution of 4 mm. The characterization results show the display’s performance with a maximum vertical displacement of 1.8 mm, a rise time of 0.25 second, and a maximum refresh rate of 8 Hz. This technology can be implemented to develop a high resolution remote haptic communication system.
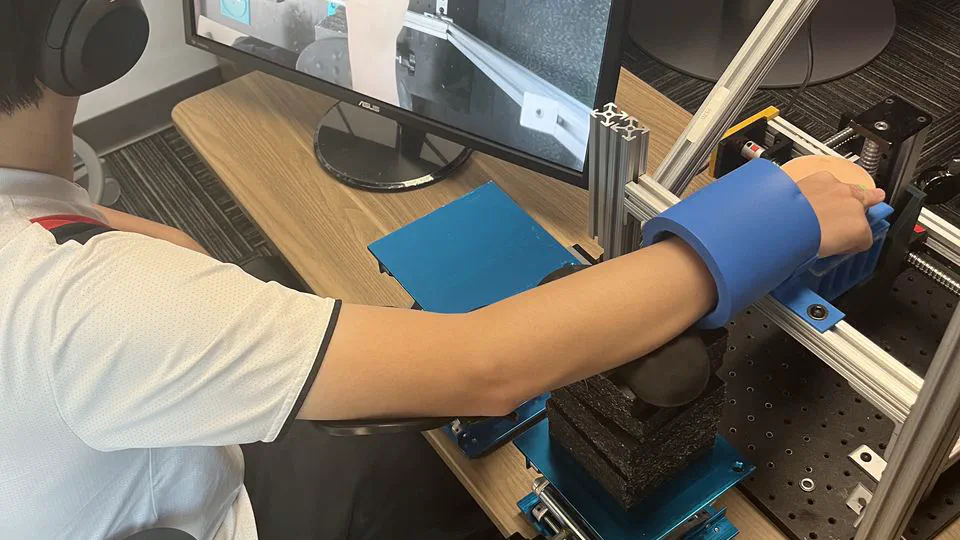
This testbed enables participants in roles of nurse and doctor to simultaneously feel two identical tissue phantoms. The nurse actively palpates the tissue, while the doctor’s passive hand feels the same sensations by having the phantom move with respect to their hand. We are using this platform to study impacts of embodiment on experience of the doctor, and to observe psychological impacts and communication strategies between doctor and nurse roles.
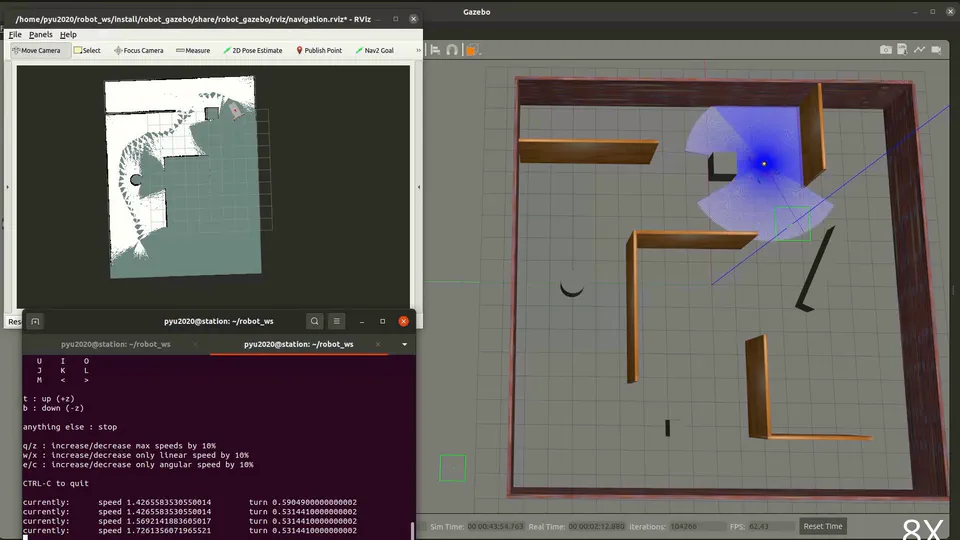
The purpose of this internship is to complete the basic autonomy of a ground vehicle. I will complete the SLAM and navigation based on LIDAR LD06, IMU, a depth camera and RGB camera. I used ROS2 galactic, OpenCV and Navigation2 to finish the whole project. Before running navigation in the physical robots, I will test these approaches in the Gazebo Simulation platform.
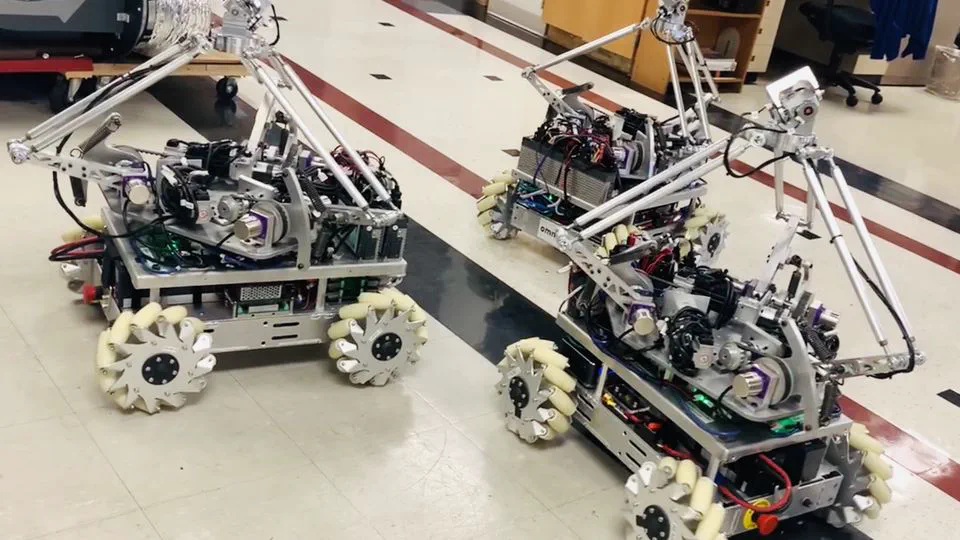
The final goal of this project is to control a group of three omnidirectional robots to move some heavy objects together. There are two parts to this robot. The top half part of this robot is a delta robot, which is used to withstand some heavy objects. The bottom half part of this robot is an omnidirectional mobile robot with four mecanum wheels.
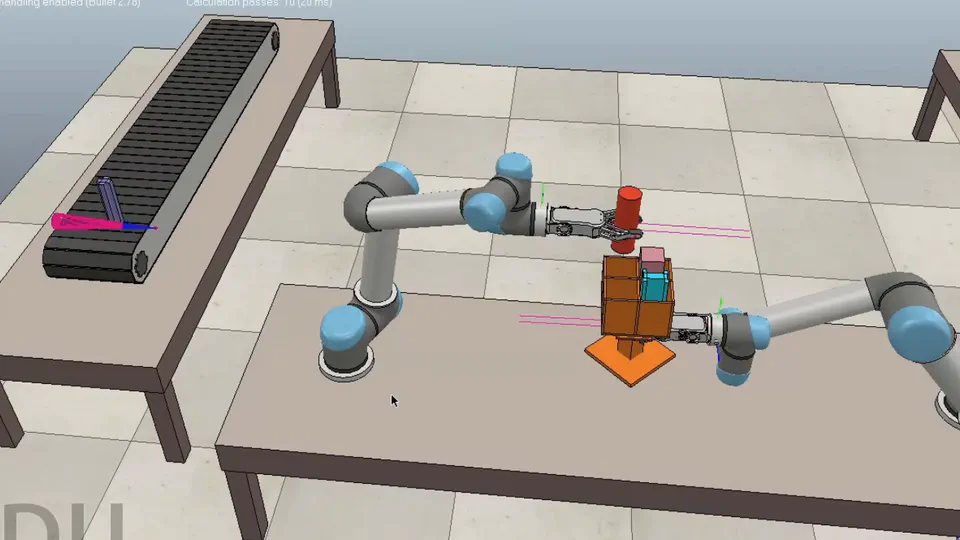
A dual-arm collaborative robotic assembly system using two UR5 robots with RG2 grippers, controlled through MoveIt! and CoppeliaSim for automated object assembly with conveyor belt integration and Docker containerization.