Towards High Fidelity Remote Palpation System
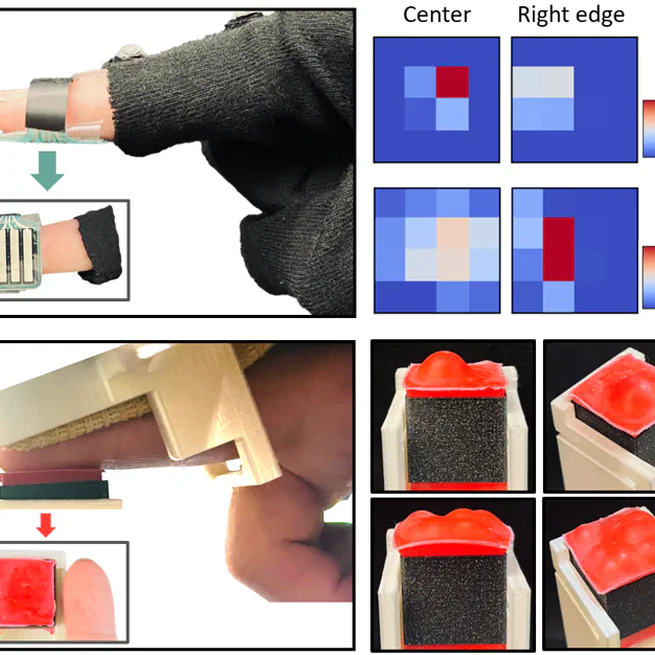
In this study, we proposed a ROS 2 telepalpation system by integrating a 4x4 soft pneumatic array on a rigid platform; implemented a novel mapping algorithm where OptiTrack motion data drives the stage and K-Means clustered high-resolution tactile sensing data drives the pneumatics.
Feb 11, 2026