The Impact of Palpation Motion on Capturing Lumps in Tissue with Force Sensor
 Proposed remote health technology
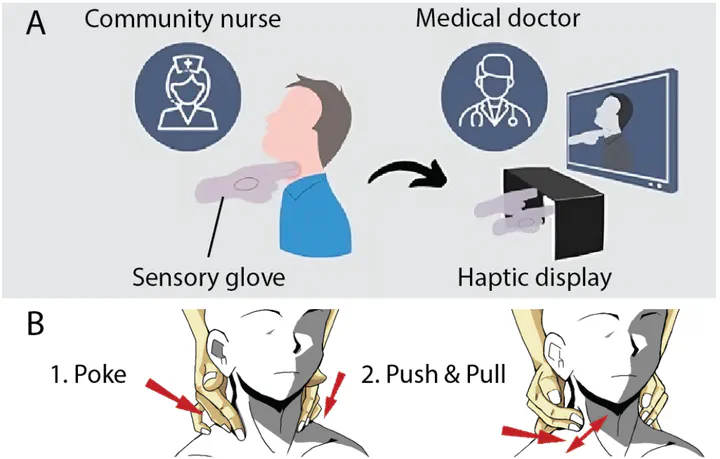
Proposed remote health technologyMedical palpation is a vital diagnostic technique where practitioners assess a patient’s condition through tactile examination. Advances in remote health technologies, such as robotic hands and sensorized gloves, aim to address practitioner shortages and improve diagnostic quality by capturing essential haptic information. In thyroid examinations, differentiating nodule sizes is critical for identifying malignant lumps.
This study investigates how palpation motion affects the sensing performance of single-point normal force sensors in detecting thyroid nodules. Using a phantom skin model with lumps of varied sizes and depths, force data was captured and visualized as stiffness distribution (tactile imaging). The captured lump shapes were compared to actual shapes using Correlation Coefficient (CC), Mean Squared Error (MSE), and Structural Similarity Index (SSIM).
Results showed that single-point normal force sensors effectively detect lumps, particularly during major motions like Poke and Push & Pull, with Poke consistently yielding superior performance across various sizes and depths. However, estimating lump shapes becomes increasingly challenging as lump depth increases, regardless of the motion applied. These findings emphasize the importance of motion in optimizing single-point sensors for palpation and provide valuable insights for developing sensorized gloves for clinical use, particularly in remote healthcare systems.