Soft Haptic Display Toolkit: A Low-Cost, Open-Source Approach to High Resolution Tactile Feedback
 The 4 × 4 tactile array haptic display
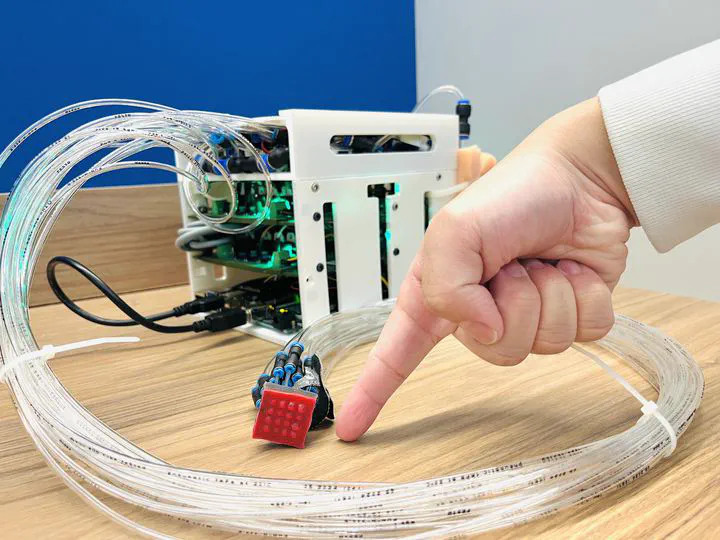
The 4 × 4 tactile array haptic displayHigh-spatial-resolution wearable tactile arrays have drawn interest from both industry and research, thanks to their capacity for delivering detailed tactile sensations. However, investigations of human tactile perception with high-resolution tactile displays remain limited, primarily due to the high costs of multi-channel control systems and the complex fabrication required for fingertip-sized actuators.
In this work, we introduce the Soft Haptic Display (SHD) toolkit, designed to enable students and researchers from diverse technical backgrounds to explore high-density tactile feedback in extended reality (XR), robotic teleoperation, braille displays, navigation aid, MR-compatible somatosensory stimulation, and remote palpation. The toolkit provides a rapid prototyping approach and real-time wireless control for a low-cost, 4×4 soft wearable fingertip tactile display with a spatial resolution of 4 mm. We characterized the display’s performance with a maximum vertical displacement of 1.8 mm, a rise time of 0.25 second, and a maximum refresh rate of 8 Hz. All materials and code are open-sourced to foster broader human tactile perception research of high-resolution haptic displays.