Towards High Fidelity Remote Palpation System
 High Resolution Tactile Sensing and Display
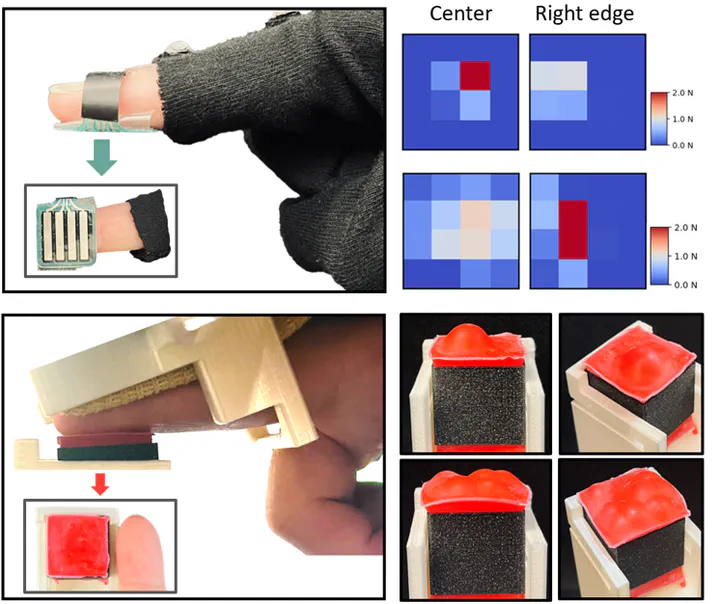
High Resolution Tactile Sensing and DisplayRemote palpation enables noninvasive tissue examination in telemedicine, yet current tactile displays often lack the fidelity to convey both large-scale forces and fine spatial details. This study introduces a hybrid fingertip display comprising a rigid platform and a 4x4 soft pneumatic tactile display (4.93 mm displacement and 1.175 N per single pneumatic chamber) to render a hard lump beneath soft tissue. This study compares three rendering strategies: a Platform-Only baseline that renders the total interaction force; a Hybrid A (Position + Force Feedback) strategy that adds a dynamic, real-time soft spatial cue; and a Hybrid B (Position + Preloaded Stiffness Feedback) strategy that provides a constant, pre-calculated soft spatial cue.
Psychophysical evaluations with 12 participants assessed lump detection and size discrimination using soft tissue phantoms. Detection accuracy increased from 50.0% (Platform-Only) to around 98% (Hybrid A and B), with elevated confidence and realism attributed to contact area modulation. Size discrimination accuracy reached 86.1% (Hybrid A) versus 63.9% (Platform-Only), underscoring the role of temporal-spatial cues in edge perception. Future efforts will enable real-time teleoperation, diverse tissue testing, and clinician validation.